Surface Nets Vertex Ambient Occlusion
In this short blog post I will show you how I implemented fake per-vertex ambient occlusion in both cFlake engine and my current Unity procedural terrain generator. First of all, here are the results of the ambient occlusion map in these two implementations. For future reference AO refers to Ambient Occlusion. Too lazy to type it out :3
Small Showcase
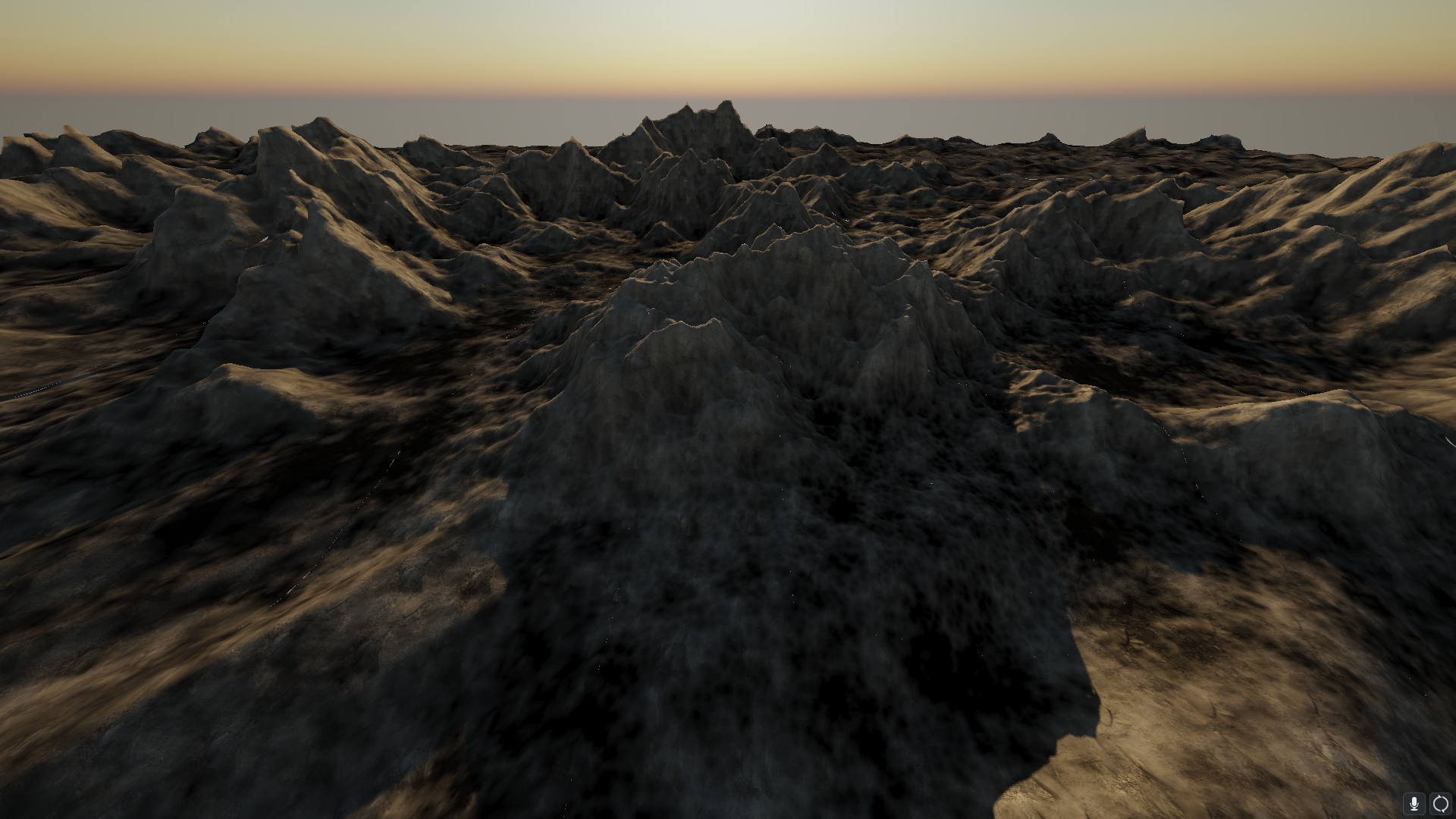
No AO 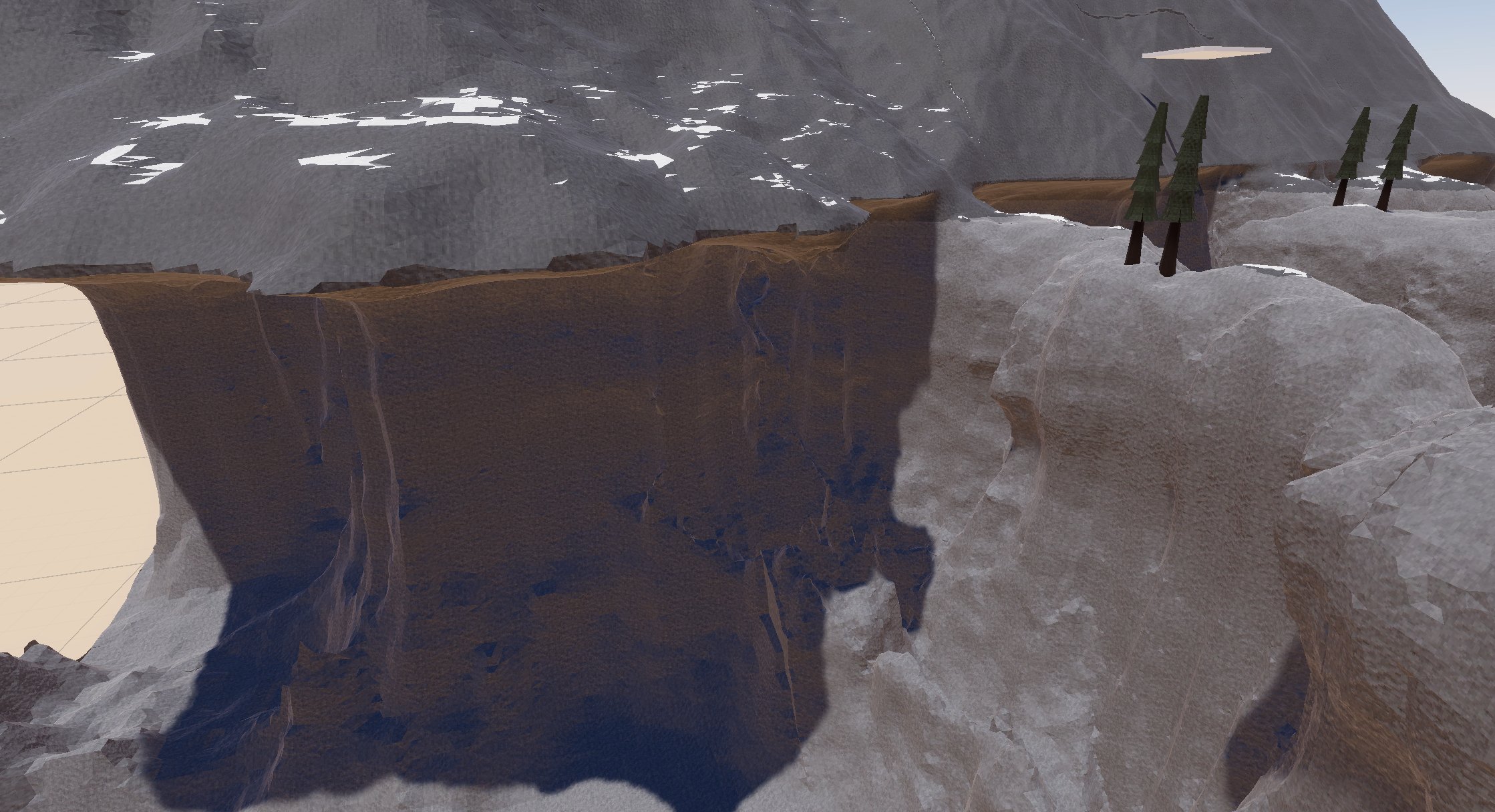
With AO. As you can see, the ambient occlusion adds quite a lot of depth to the terrain in low light situtations like in shadows. This effect is more pronounced in caves as well. It affects a much larger area of the terrain compared to screen space effects like SSAO, and it is pretty cheap to compute as well. 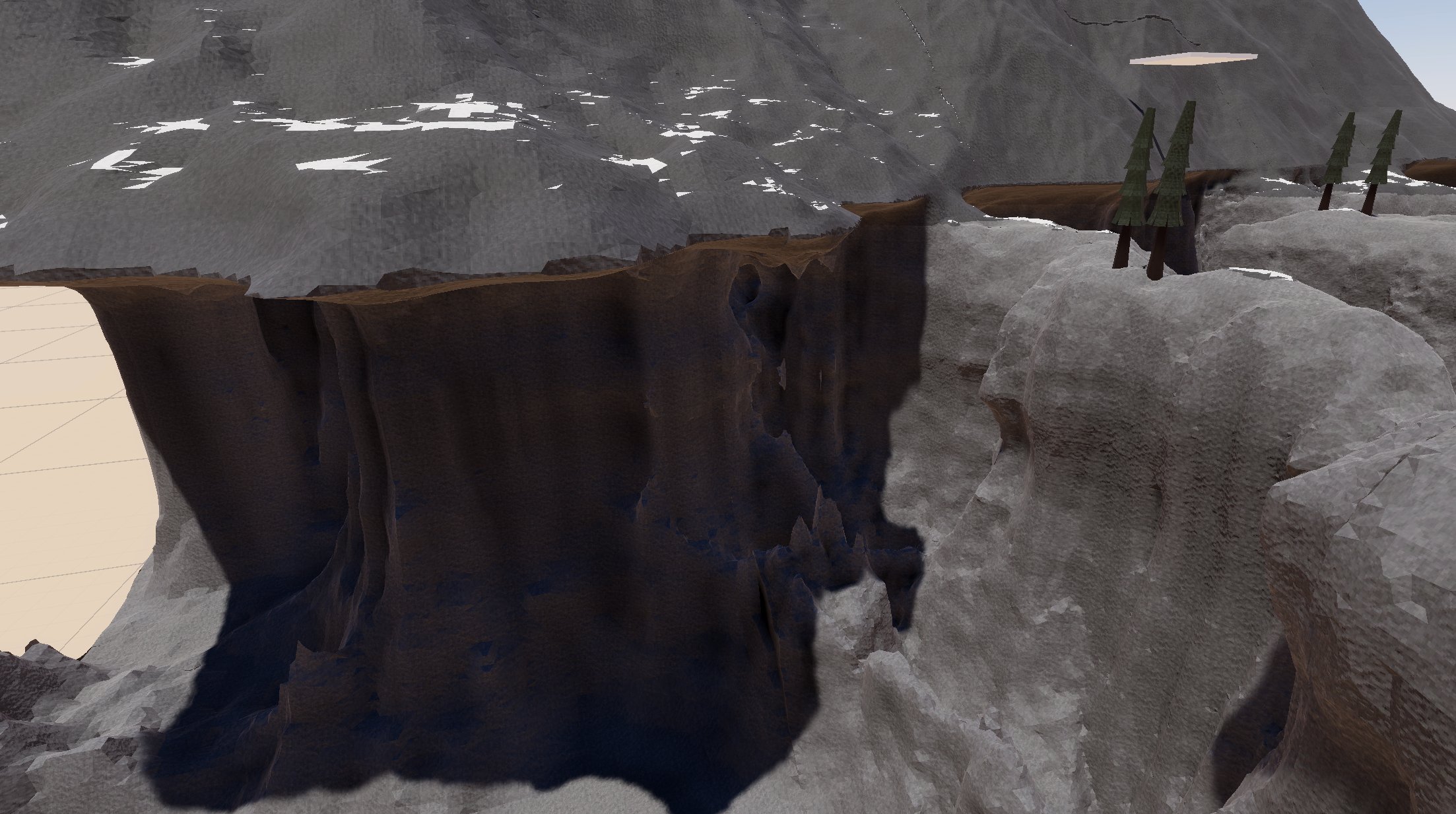
Implementation
To implement such a system, you will first need a way to sample the density/isosurface function (the function I use to generate my procedural terrain using isosurface extraction algorithms) at any given point. This might be easy for some, but for me this was quite problematic as my procedural density generator is implemented on the GPU, and my voxel meshing is on the CPU. I will show you how I implemented it nonetheless)
cFlake GLSL Implementation
This is the first time I experimented with this algorithm to even see if it would work out, and here's the code that I used to make it actually work. I calculate average ambient occlusio
// Get the density at a specific point (interpolated)
vec2
// Calculate per vertex ambient occlusion by sampling close voxels and checking their densities
float
As you can see, the algorithm in of itself is rather simple (and brute-forced). All I do is loop over a 3x3x3 region around the current vertex that I am about to generate and check how many density voxels are negative (marking terrain) vs how many density voxels are positive (marking air). Do note that you fetchLinear is a function implemented to get me the density function at any given floating point (not necessarily grid points) (trilinear sampling) using a per-chunk cached density map, which means that this algorithm does not read voxel data from nearby chunks which makes it easily parallelizable.
AO debug view in cFlake 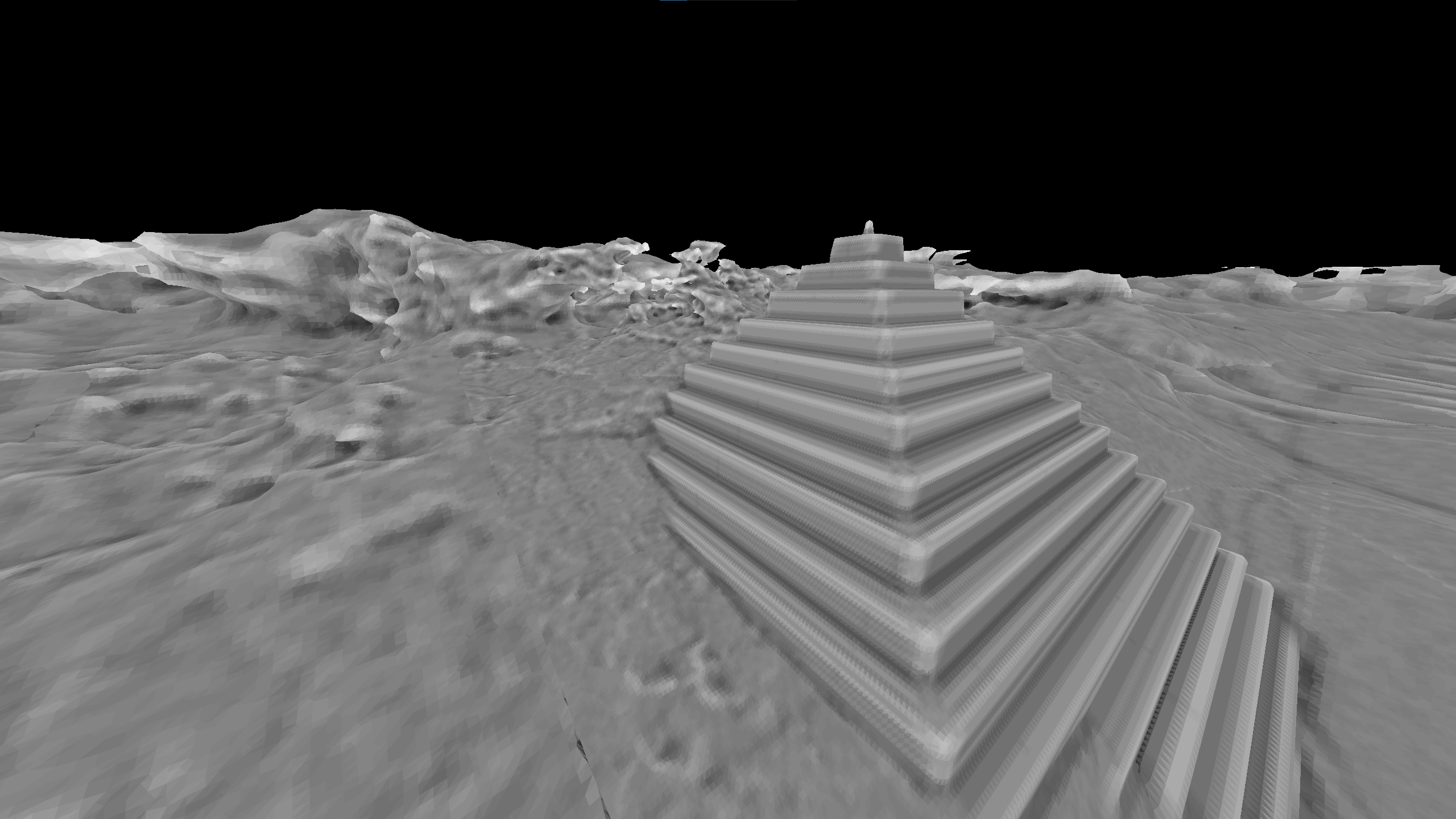
For example this is how it looked like before implementing the fetchLinear. You can clearly see the banding that occurs due to the fixed grid 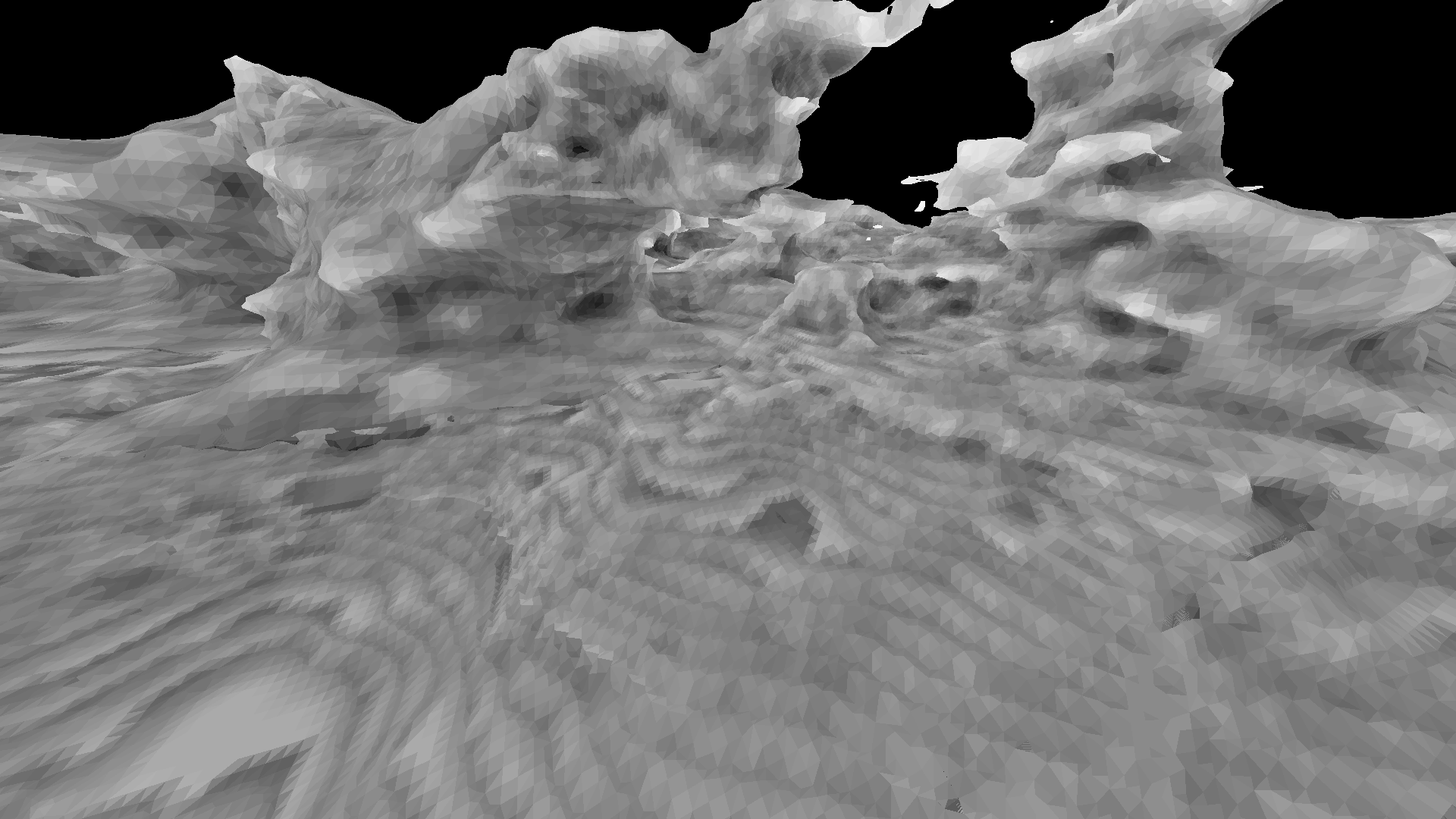
Unity Job System Implementation
The Unity implementation is not that different, just implemented on the CPU instead using Unity's Job System. I also made this one a bit prettier by applying a curve to the final AO and make it scale with the density of the fetched voxels, which reduces the blocky-ness effect that you get from using Surface Nets or Dual Contouring.
public static int
public static half {
float3 frac = math.;
uint3 voxPos = math.;
voxPos = math.;
voxPos = math.;
float d000 = voxels.density;
float d100 = voxels.density;
float d010 = voxels)].density;
float d110 = voxels)].density;
float d001 = voxels)].density;
float d101 = voxels)].density;
float d011 = voxels)].density;
float d111 = voxels)].density;
float mixed0 = math.;
float mixed1 = math.;
float mixed2 = math.;
float mixed3 = math.;
float mixed4 = math.;
float mixed5 = math.;
float mixed6 = math.;
return mixed6;
}
// Calculate ambient occlusion around a specific point
public static float
Here's a better picture of the AO in action in blocky unity terrain 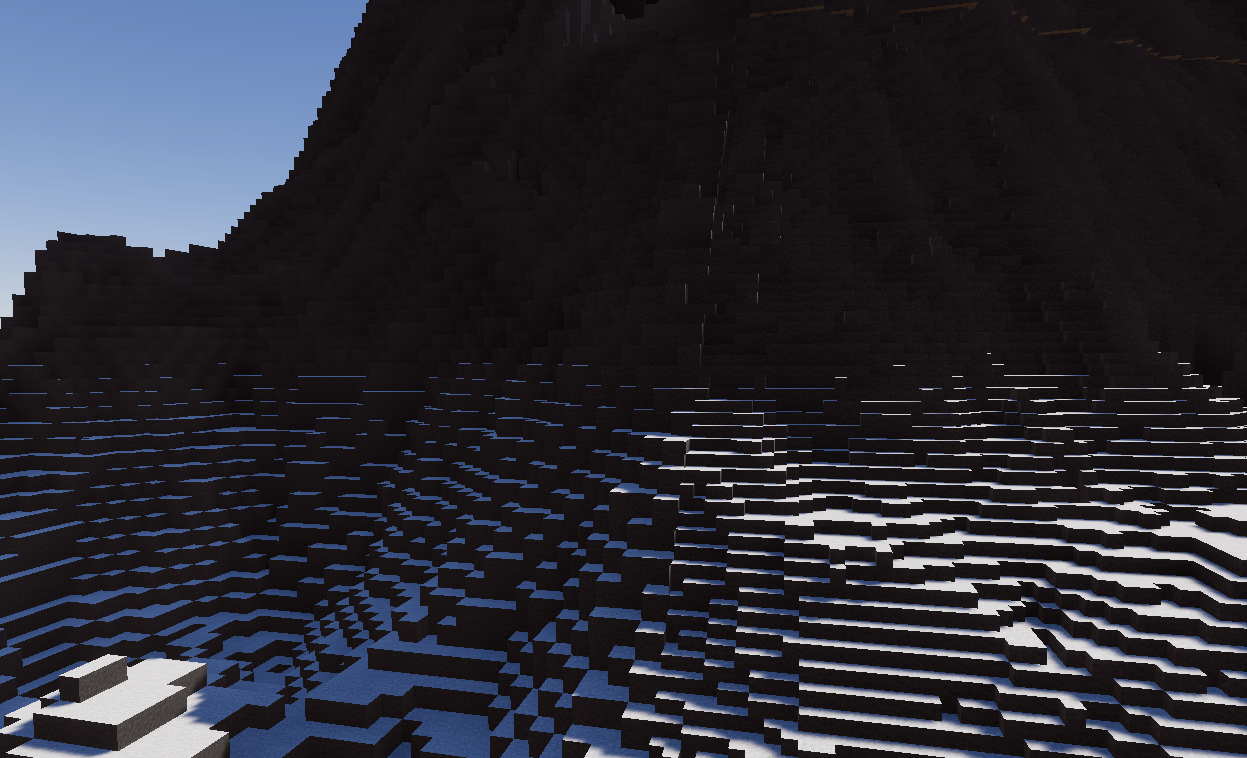
Conclusion
Overall it's a pretty cheap algorithm that enhances the quality fidelty of the terrain without too much work. I personally consider that a success. The only main problem with this algorithm is that it can't really simulate large scale ambient occlusion effect. Like at best, this only simulates stuff largers than SSAO but smaller than something like GI.
Another minor defect that comes with my implementation as well is that sometimes chunk edges are very noticeable since the voxel fetching algorithm does not take account voxels from nearby chunks (this is implemented to improve performance by decoupling chunk generation). So chunks edges can be noticeable when there's lots of AO in certain cases.
Side Note
Edit: Oct 25, 2025. The defects that occur due to not sharing voxel data between chunks can be alleviated by, well, allowing the AO algorithm to visit voxel data between chunks. This is what we do in the newest version of the ECS terrain generator for Unity. It adds quite a bit of complexity and overhead, since we:
- Need to load the values in other chunks through indirect pointers (not too good considering the algorithm already loads values sporadically, which incur lots of cache misses I assume.)
- Need to keep track of chunks that need to be "re-lighted". Since we make chunks visible whenever they get their meshes, some chunks become visible even before their AO lighting code is executed due to uncompleted dependencies on other chunks' voxel data. This forces us to recalculate the lighting twice, and apply it after the chunk has become visible. Since this larger AO is much more expensive, this lighting recalculation takes up a lot of the thread time and CPU cycles.
I do wonder if this can be extended for full on voxel GI simulation. Something where "rays" would come from the current sun direction and then reflect off. One could even make this work faster by just pre-simulating this for a bunch of sun angles and then just blending between them. Maybe something like that could fake at least "big GI" like, when having the sun's really strong rays reflect off of a sandy or white surface. Something like this below Some GI like this, but like, way way bigger. I also wanna see if this "pre-computation" stuff can also be extended to handle large scale shadows without having to render a shadowmap. Maybe you could store the data within the vertex colors directly for specific sun angles, could be cool to figure out how to do that.
Side Note
I did notice through my testing and experimentation with my engine from time to time using the density function itself (or at least part of it) would yield some pretty cool results. Never managed to make use of it for AO but it looks kinda similar and cool enough to mention it at least. It is pretty cool.